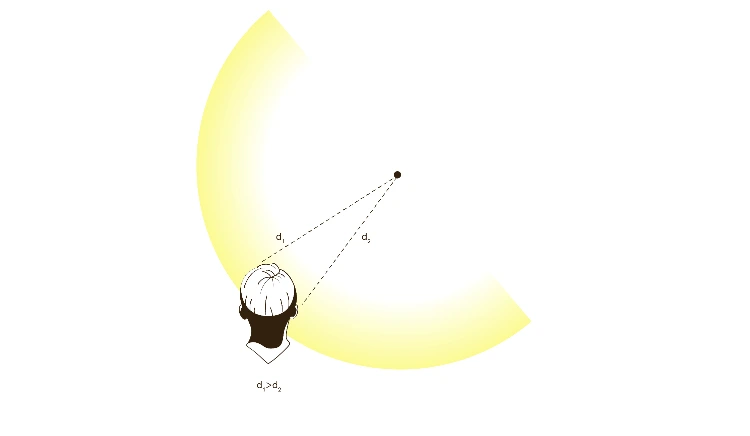
What determines the position of the points on an object?
Points appear where the sound waves bounce back to the sensor. This happens from any surface that has a normal pointing to the sensor. Sound is also reflected back by edges and corners. For each surface or edge, the detection is positioned at the point on that surface or edge which is closest to the sensor.
Does the sensor have ignore zones?
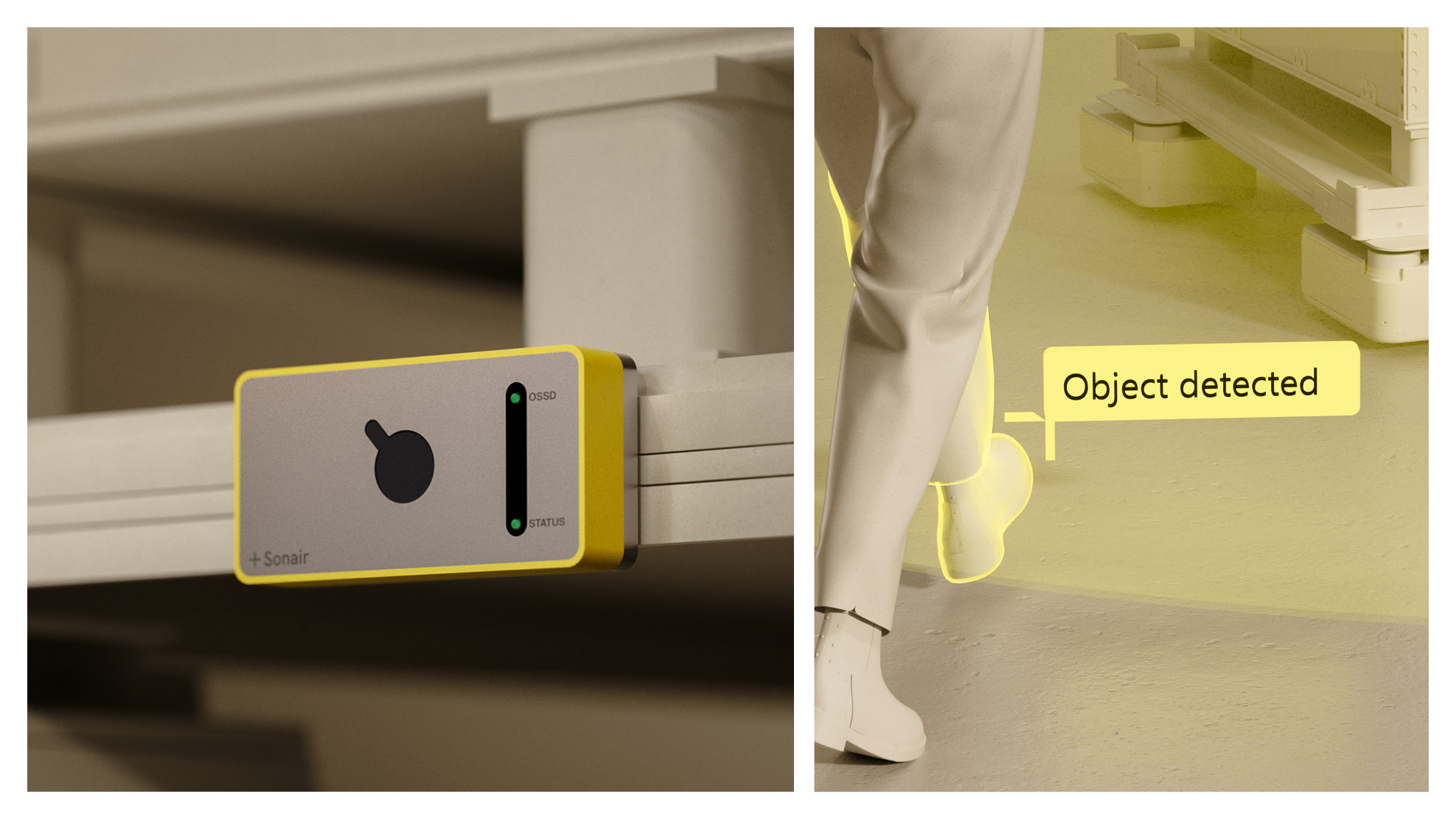
Yes, the sensor supports configurable ignore zones. These can be set by the user to prevent detection of known static objects, such as parts of the robot’s frame, ensuring they don’t trigger false positives.
What are the available ROS2 interfaces?
The sensor publishes a point cloud and status message through COAP. We provide a ROS2 driver that receives these messages and publishes a point cloud topic using the ROS2 standard message type: sensor_msgs/msg/PointCloud2. For customers not running ROS2 internally, we also provide a docker image that enables the use of Foxglove for visualization of the point cloud.ADAR does not do object classification. The sensor is for people and object detection.

hello@sonair.com
Gullhaug Torg 2D
0484 Oslo
Norway







.jpg)