
 Request a demo
Request a demoADAR One meets the SIL2 standard for functional safety in industrial automation, process control, and machinery.
ADAR One meets Pl d, which measures a control system’s ability to prevent and minimize hazards.
Monitor a full 180° × 180° sensing volume at distances up to 4 metres.
Capture the complete sensing volume instead of a single plane, improving safety and obstacle detection.
Acoustic detection and ranging (ADAR) uses airborne ultrasound and advanced signal processing to detect people and objects in true 3D space.
Instead of monitoring a single line or plane, ADAR monitors safety volumes around machines and robots.
This enables safer and more flexible automation in environments. ADAR can protect entire workspaces.


ADAR emits sound and captures echoes to detect objects in 3D, enabling perception in darkness, dust, or glare where cameras and LiDAR struggle.
.jpg)
Using a fixed ultrasonic array with no moving parts, ADAR covers a 180° x 180° field of view. This gives robots robots omnidirectional awareness with centimeter-level precision.

At the heart of ADAR are PMUTs (Piezoelectric Micromachined Ultrasonic Transducers)—tiny, high-performance ultrasonic emitters and receivers fabricated using MEMS technology.
Using a fixed ultrasonic array with no moving parts, ADAR covers a 180° x 180° field of view. This gives robots robots omnidirectional awareness with centimeter-level precision.

Advanced algorithms digitally steer and focus sound waves in real time—similar to how high-end medical ultrasound works—enabling sharp object tracking even in cluttered environments.
Size
Height 54 mm, width 104 mm, depth 25 mm
Weight
200 g
Detection range
0-4 m
Detection close range
0-5 cm (obstacle is detected but position not reported)
Range precision
2-10 cm
Angular precision
0-45°: ~3°
45-70°: ~6°
70-90°: > 10°
Detection capability (safety function)
Torso (≥ Ø155 mm)
- 0-3 m at 0-75°
- 0-2 m at 0-80°
Legs (≥ Ø70 mm)
- 0-2.5 m at 0-60°
- 0-1.5 m at 0-80°
Cylinder with acoustically hard surface(≥ Ø30 mm)
- 0-3 m at 0-60°
- 0-1.5 m at 0-80°Ø30 mm cylinder up to 3 m
Allow multiple ADAR devices inside the detection range without crosstalk
Yes
Interfaces
Safe output: 1 OSSD Pair
- Protective zone
Outputs: 2 status outputs
- Inner warning zone
- Outer warning zone
Safe inputs: 11 static control inputs
- Zone select
Data interface: 1 Ethernet (COAP over UDP/IP)
- 3D point cloud
- Configuration
Display elements: 2 dual color LEDs
- OSSD status
- System and warning zone status
Number of simultaneously monitored zones
3 (1x protective zone, 2x warning zones per preset)
Number of zone presets
128
Ultrasonic frequency
65-85 kHz
Response time
Min 112 ms
Power consumption
Max 5 W
Supply voltage
24 V DC (18 V to 28 V DC) (SELV/PELV)
Ingress protection (IP)
IP64
Temperature
0 to +50 Celsius
(operating temperature)
Field of view (FoV)
180 x 180 degrees
Frame rate
Max 18 Hz
Safety parameters
ADAR is designed to fulfil the following safety standards Please visit the technical data sheet for full details.
Safety integrity / performance level:
SIL2 (IEC 61508) / PL d (EN ISO 13849)
Sensor standard:
IEC 61496 (with adaptations to ultrasound technology)

Revolutionary MEMS transducers
Our tiny, custom-made PMUTs enable the magic of ADAR
Quad-core ARM SoC
The powerhouse behind ADAR's real-time 3D awareness
Rust
A trailblazing programming language for embedded development
ROS2
The open source robotic middleware that delivers ADAR's 3D point cloud output
OSSD
the output signal switching device is what instructs the robot to stop when safetyevents occur
ADAR One was assessed as a human protection sensor according to IEC 61496, the demanding standard for electrosensitive protective equipment. It also meets two foundational standards: IEC 61508, the functional safety standard for electronic safety systems in high-risk industrial environments, and ISO 13849, the universal standard for safety-related parts of control systems.
ADAR is rated SIL 2 (Safety Integrity Level 2), with a probability of dangerous failure (PFH) below 1.5 x 10⁻⁷ per hour. It is a qualified perception component for safety functions requiring PL d (Performance Level d) under ISO 13849.
ADAR has received an EC type-examination certificate from exida, a notified body under the Machinery Directive 2006/42/EC. Beyond the standards above, exida assessed ADAR's conformity to the essential health and safety requirements of the directive.
ADAR is the first safety-certified embedded system built in Rust, a programming language designed for performance, safety, and reliability.
.webp)
.avif)
Deploy ADAR on autonomous robots in in warehouses, factories, logistics, retail environments, hospitals and more.
Why ADAR? Full 3D views with 180x180° views above and below the 2D plane, easy integration, immune to light conditions and dust.
Deploy ADAR on autonomous robots in in warehouses, factories, logistics, retail environments, hospitals and more.
Why ADAR? Full 3D views with 180x180° views above and below the 2D plane, easy integration, immune to light conditions and dust.
.avif)
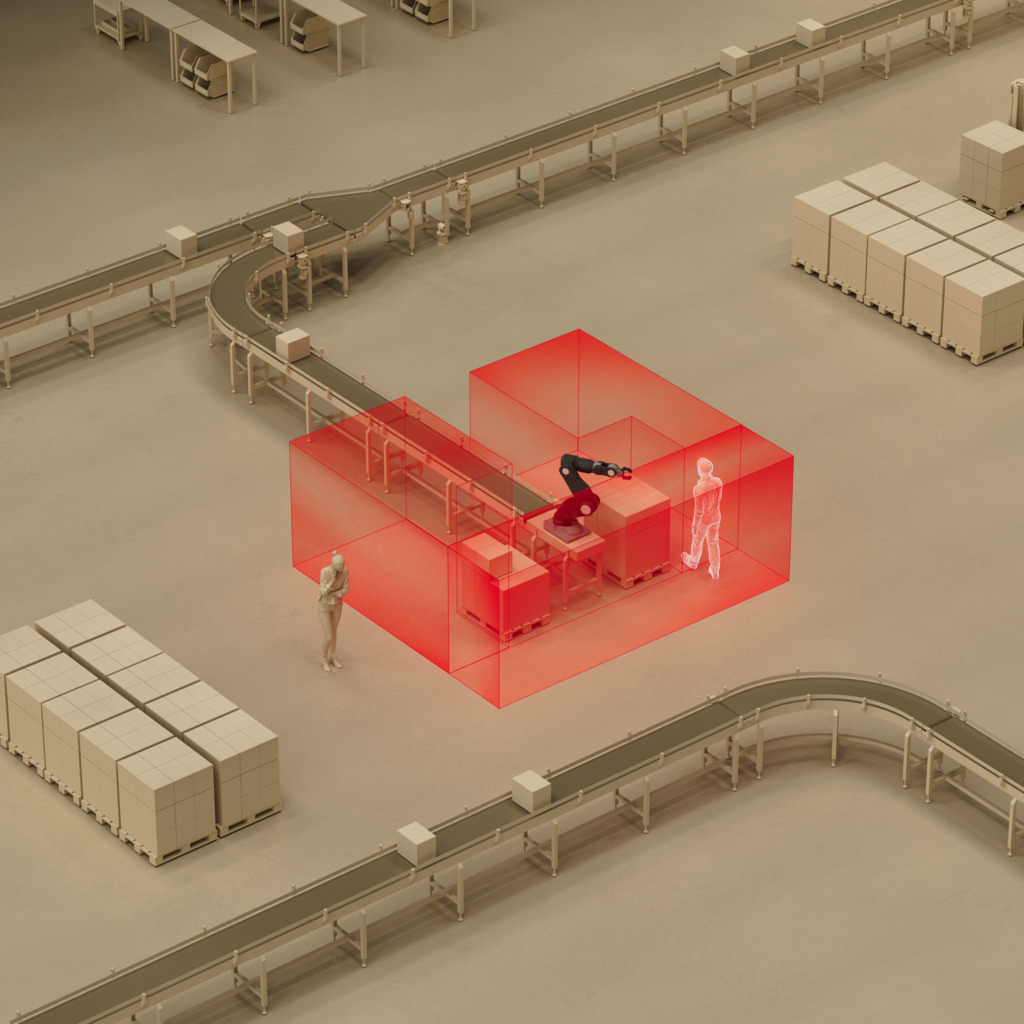
Place ADAR in places like robot cells, palletizers, CNC machine tending, and packaging lines.
Why ADAR? No more single planes, robust operation, one device for any application, precise and dynamic safety zones
Place ADAR in places like robot cells, palletizers, CNC machine tending, and packaging lines.
Why ADAR? No more single planes, robust operation, one device for any application, precise and dynamic safety zones
%201.webp)
ADAR is designed to integrate easily into modern robot sensing stacks.It can operate as a primary safety sensor or as part of a multi-sensor perception system, working alongside cameras, LiDAR, and navigation systems. Because ADAR uses sound rather than light, it remains reliable where optical sensors struggle – helping fill important perception gaps.
Typical integration scenarios include:
Primary safety sensing
ADAR provides 3D human and obstacle detection for robots operating in shared human environments.
Safety redundancy layer
Provide independent sensing in multi-sensor architectures, with sound rather than light, to help fill important perception gaps.
Complementing LiDAR or cameras
ADAR adds vertical awareness and close-range detection, helping identify hazards that flat sensing planes can miss.
Compact robot platforms
With its small footprint and low power consumption, ADAR integrates easily into mobile robots where space and energy are limited.
Fleet-scale deployment
Low power consumption and semiconductor manufacturing enable cost-effective scaling across large robot fleets.
Begin with our test kit to evaluate ADAR on your robot, validate safety zones, and integrate into your control system, then scale seamlessly to production.

hello@sonair.com
Gullhaug Torg 2D
0484 Oslo
Norway
