
Your questions, our answers
Performance & capabilities
What is the maximum of points you have in the point cloud?
The ADAR sensor reports 1 point per surface pointing towards the sensor on any object, making the total number of points per object low. This is opposite to what one might be used to from LiDARs. The relative sparsity of the point cloud is a fundamental feature of sound-based sensing. However, this is not a sensor limitation for object detection, as the point cloud will always contain at least 1 point per object.
In theory several thousand objects can be detected simultaneously in one scene.
Why is your point cloud sparse and why do you get one point per object?
The sensor returns one detection point for each surface that reflects sound back towards it, which is a fundamental property of ultrasonic sensing. The closest part of an object will always be detected, as it will have a surface normal to the sensor, as long as the surface is larger than the minimum detectable object size.
The data may appear sparse compared to the dense point clouds produced by LiDARs. However, this does not mean that objects are missed. All objects located in the field of view that are within the detection capability are detected and reported, providing sufficient information for reliable and informed decision-making.
Most objects, including people, have multiple surfaces pointing towards the sensor. As a result, they typically return more than one point to the sensor.
What determines the position of the points on an object?
Points appear where the sound waves bounce back to the sensor. This happens from any surface that has a normal pointing to the sensor. Sound is also reflected back by edges and corners.
For each surface or edge, the detection is positioned at the point on that surface or edge which is closest to the sensor.
Can the sensor distinguish between humans and objects among detected obstacles?
ADAR does not do object classification. The sensor is for people and object detection.
Can your sensors detect smaller objects than what was listed in your datasheet?
Yes, under certain conditions, the sensors may detect smaller objects than specified in the datasheet.
The listed values are based on standardized test conditions to ensure reliable and repeatable performance. In practice, smaller objects can sometimes be detected if they reflect enough sound back to the sensor.
This depends on factors such as e.g. orientation, surface shape etc.
However, detection of objects below the specified size cannot be guaranteed across all scenarios. This can also be tuned by adjusting the sensitivity.
What is the angular resolution of your sensor?
This concept is not easily definable with ADAR because a pulse is not sent out in a discrete angle. If you are familiar with LiDARs, angular resolution is the angular distance (in degrees) between distance measurements of 2 beams. This does not apply to ADAR because it does not emit beams.
The angular precision is 2° straight ahead and 10° to the sides. The sensor is able to distinguish between multiple detected objects, if the objects are separated by more than 2 cm in range relative to the sensor or by more than 15° from each other.
If the two objects are positioned closer than 2 cm or 15° from each other, they will be detected as 1 object.
Precision is a measure of the statistical deviation of repeated measurements on a single object’s position.
Detection scenarios
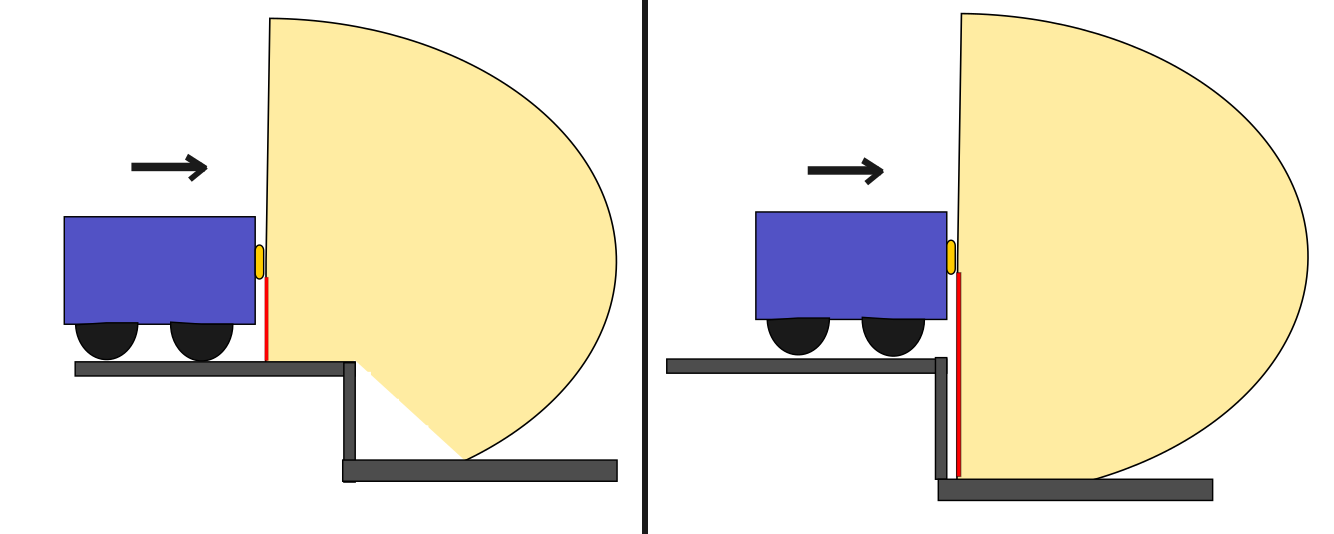
Does the sensor detect cliffs and stairs going downwards?
The sensor would be capable of detecting a sudden drop, such as a stair or a cliff edge, provided the vertical distance is less than four meters.
However, in a practical scenario, such detection may occur too late for any meaningful corrective action to be taken, unless the robot is driving extremely slow, see illustration below.
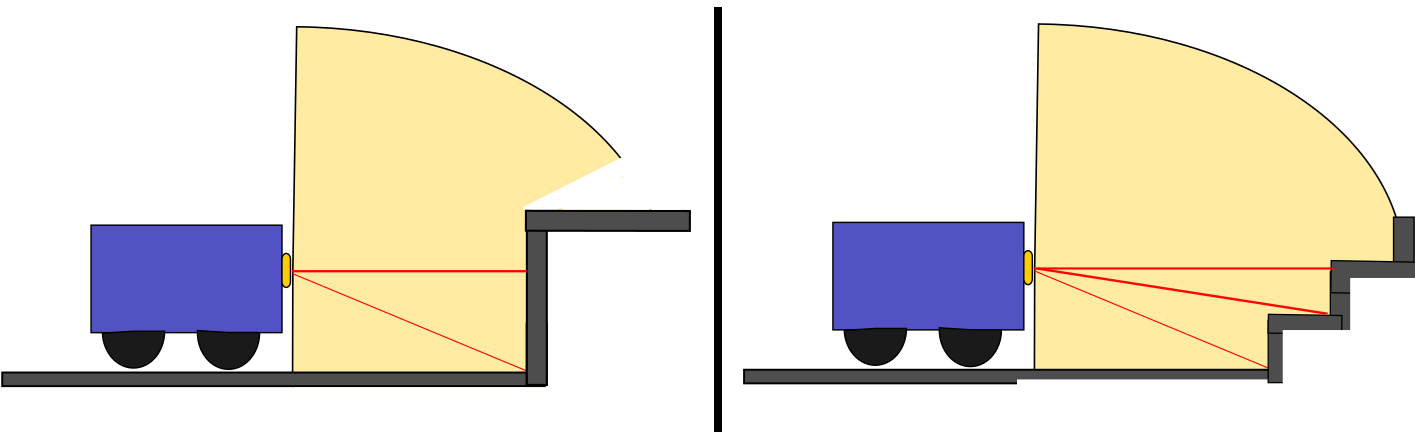
Does the sensor detect stairs going upwards?
Yes. The sensor will the detect the upwards going stair as an object, if the stair has a vertical surface.
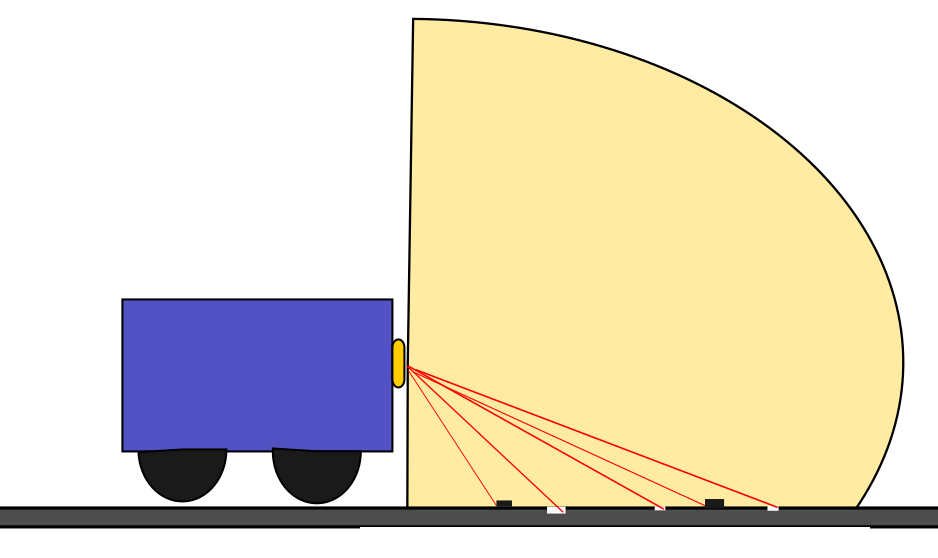
Does the sensor detect cracks, gaps, bumps and cables on the ground?
The sensor may detect cracks, gaps, bumps and cables on the ground, dependent on their size.
This performance can be adjusted depending on the user’s need. If detection is not desired, these detections can be omitted using filters and adjusting the sensitivity.
Note that filtering out these insignificant objects may affect detection capability of significant small objects like the tip of the forks on a forklift.
Does the sensor detect slopes going upwards?
No, our sensor is not hindered by slopes going upwards. The emitted sound is bounced away by the slope, so the sensor does not detect it as an object.
How do your sensors work in rain and fog?
The sensor performance (particularly maximum range) is affected by too much rain or too much fog.
Our first product is intended for indoor applications.
Are your sensors affected by temperature change?
ADAR measures the time it takes for a transmitted pulse to travel to an object and back. The distance is calculated using the speed of sound. The speed of sound depends on the ambient temperature. Therefore, users must enter the expected local temperature if it differs significantly from the default value of 20 °C.
Example: When measuring at a distance of 1 meter, a 10°C temperature offset will result in a 2 cm error in range (2% per 10°C).
Safety & compliance
Does the sensor have ignore zones?
Yes, the sensor supports configurable ignore zones. These can be set by the user to prevent detection of known static objects, such as parts of the robot’s frame, ensuring they don’t trigger false positives.
Does the sensor have the ability to mute?
Yes. Muting the sensor would be achieved by setting the complete region of interest to an ignore zone.
Is it possible to monitor multiple independent safety zones simultaneously?
No. We only have one OSSD pair, and can thus only have one active protective zone.
We do provide two warning zones that can be monitored simultaneously with the safe protective zone, but they do not provide a safe output.
What safety standards (certifications) do your sensors comply to?
The sensors will comply with several functional safety standards, including:
- IEC 61508 (SIL2)
- ISO 13849 (Pl d)
- IEC 61496-1 (Type 3 ESPE)
What safety protocol will the sensor use?
Safe output: OSSD pair.
Safe input: 11 static control input lines.
Integration & interfaces
What are the available ROS2 interfaces?
The sensor publishes a point cloud and status message through COAP.
We provide a ROS2 driver that receives these messages and publishes a point cloud topic using the ROS2 standard message type: sensor_msgs/msg/PointCloud2.
For customers not running ROS2 internally, we also provide a docker image that enables the use of Foxglove for visualization of the point cloud.
What communication protocol do you use?
Communication is Ethernet using the CoAP protocol over UDP/IP.
What kind of output does the sensor provide? Edge-processed I/O information or large data volumes like a point cloud that the robot needs to process?
Edge-processed I/O information as well as a sparse point cloud over Ethernet UDP.
What are the mechanical fixation and electrical connection methods with the robot?
M4 mounting holes.
Flush integration to AMR chassis is recommended.
Ethernet (4-pin M12) and power, IO and OSSD (17-pin M12).
Will Sonair provide a hub or central unit for integrating multiple Sonair sensors into a single system?
Our current design requires connecting all sensors to the same network if you wish to receive point cloud data from all of them concurrently. In practice, this typically means equipping the robot with a network switch to expand the number of available ethernet ports for effective data exchange between sensors.
Additionally, it's important to note that while the ethernet connection facilitates the exchange of point cloud information, the safe I/Os operate independently. These I/Os must be connected to a PLC or other safety controller to ensure appropriate handling of safety-critical signals.
Reliability & differentiation
What can be expected in terms of calibration over time?
There are no known changes in the sensors' behaviour over time, therefore no recalibration is needed
What kind of sounds can impact the Sonair sensor?
Since our sensors operate with high frequency of 70-85kHz, sounds typically found in urban or industrial environments will not be an issue, even if they are perceived as loud for humans. Other ultrasonic sound sources in the sensor’s frequency range can also be dealt with, because the sensor is able to filter out its own sound from the background noise. The sensor may be impacted if other ultrasonic sounds are very loud, as the sensor may saturate. This will be detected by the sensor and it will report an error. Examples of such sounds is a pressurized air-gun close to the sensor.
What sets Sonair apart from other 3D ultrasound solutions?
The Sonair sensor leverages proprietary MEMS ultrasound transducers, which are millimeter-sized high-frequency transducers. This sets ADAR apart in several ways. Firstly, the frequency is close to twice as high as common ultrasonic transducers, which results in a much better range precision. Secondly, the small size enables the sensor to house multiple transducer elements spaced less than half a wavelength apart. This enables the use of sophisticated beamforming algorithms, which allows for true positioning in 3D. Other 3D ultrasound sensors using triangulation will struggle with false detections due to errors in the positioning.

hello@sonair.com
Gullhaug Torg 2D
0484 Oslo
Norway